Come collegare il sensore DHT11 (Temperatura e umidità) in cloud

 In questo tutorial vedremo:
In questo tutorial vedremo:
- come collegare un sensore DHT11 (temperatura e umidità) sul Raspberry Pi 3
- come sviluppare lo sketch in ROS per pubblicare dati sulla WebApp - Python
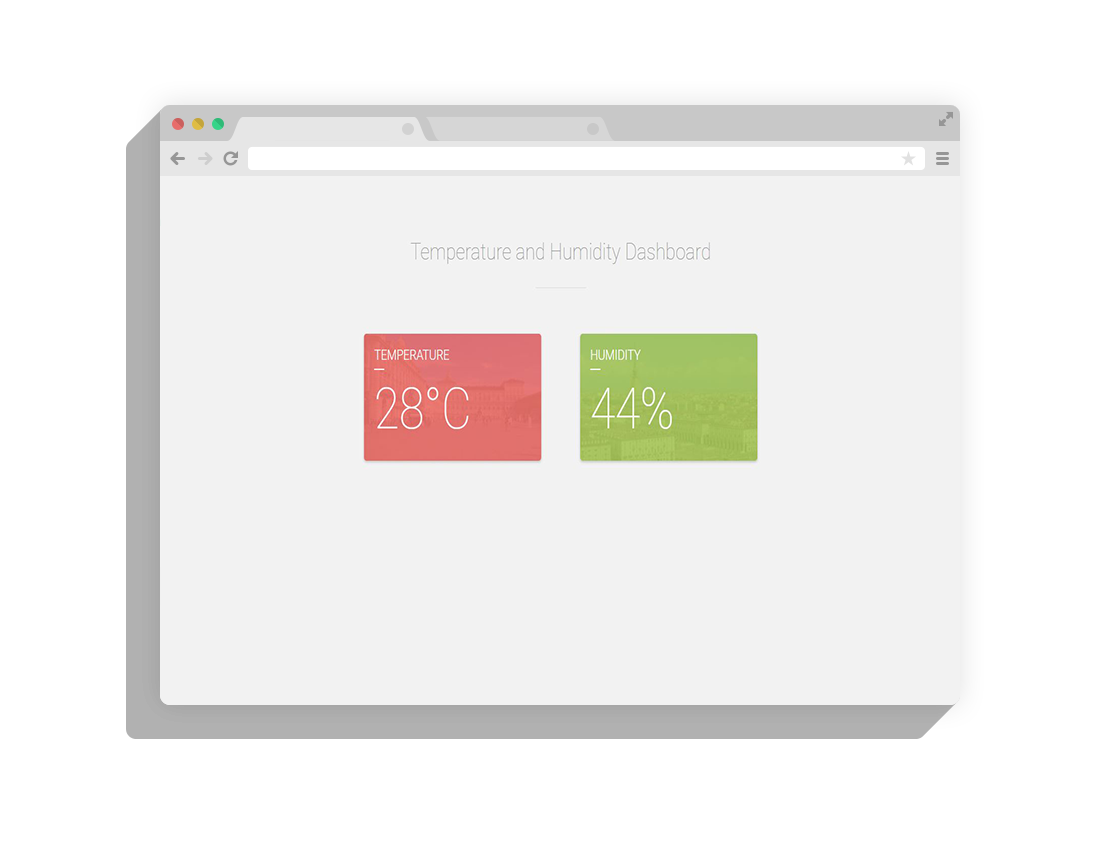
- sviluppare la WebApp - Html/Javascript
Di cosa abbiamo bisogno
- Un Raspberry Pi 3 oppure un Pi 2
- Tre cavi GPIO femmina/femmina
- Un sensore DHT11

Collegamenti
Come prima cosa prendete il Raspberry Pi 3 e accendetelo collegandola alla corrente. Una volta collegato in cloud, colleghiamo il sensore.
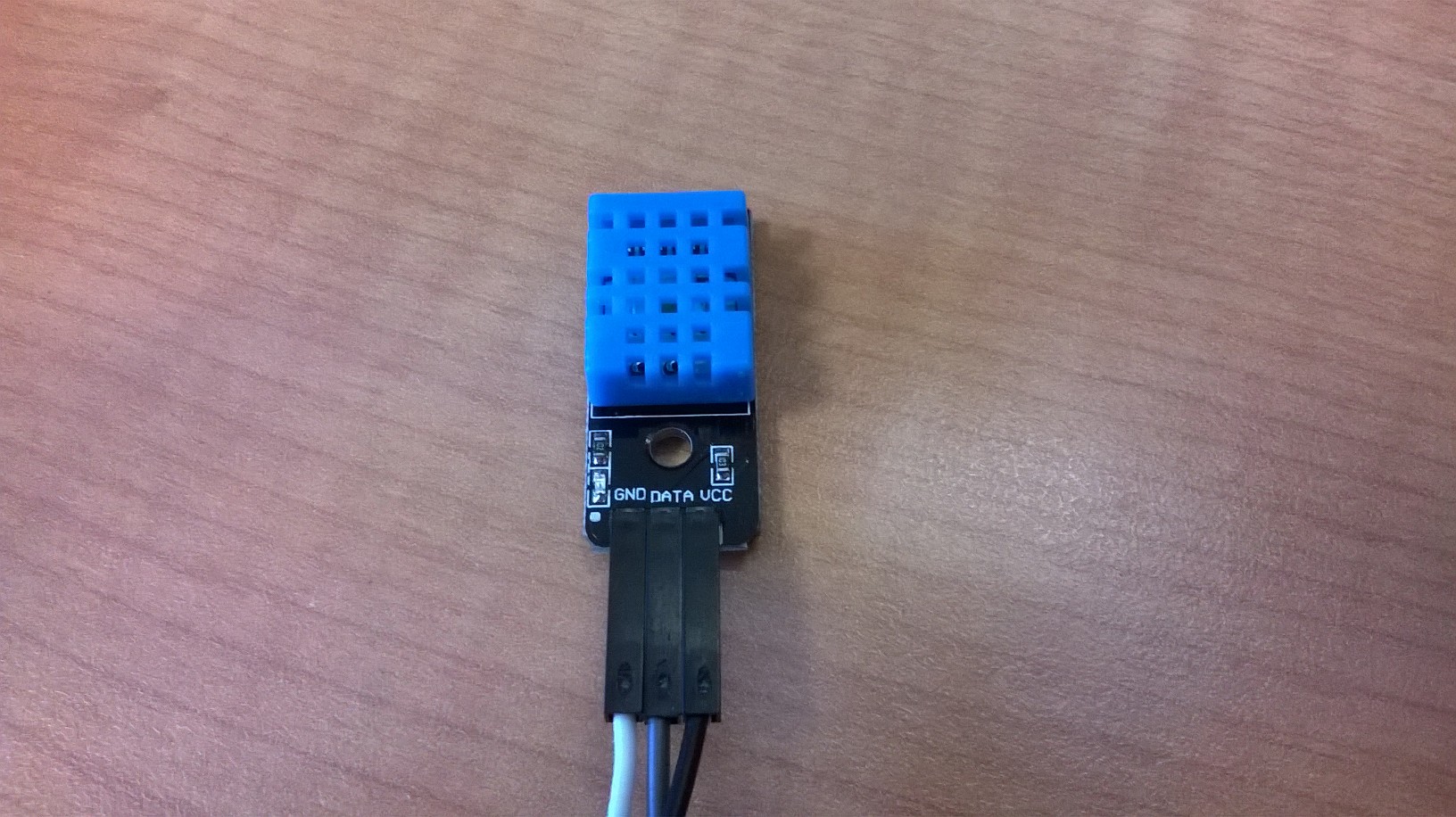
Il sensore DHT11 è un sensore di temperatura e umiditàe composta da 3 Pin: G (GND) – V (VCC) – D (Data)
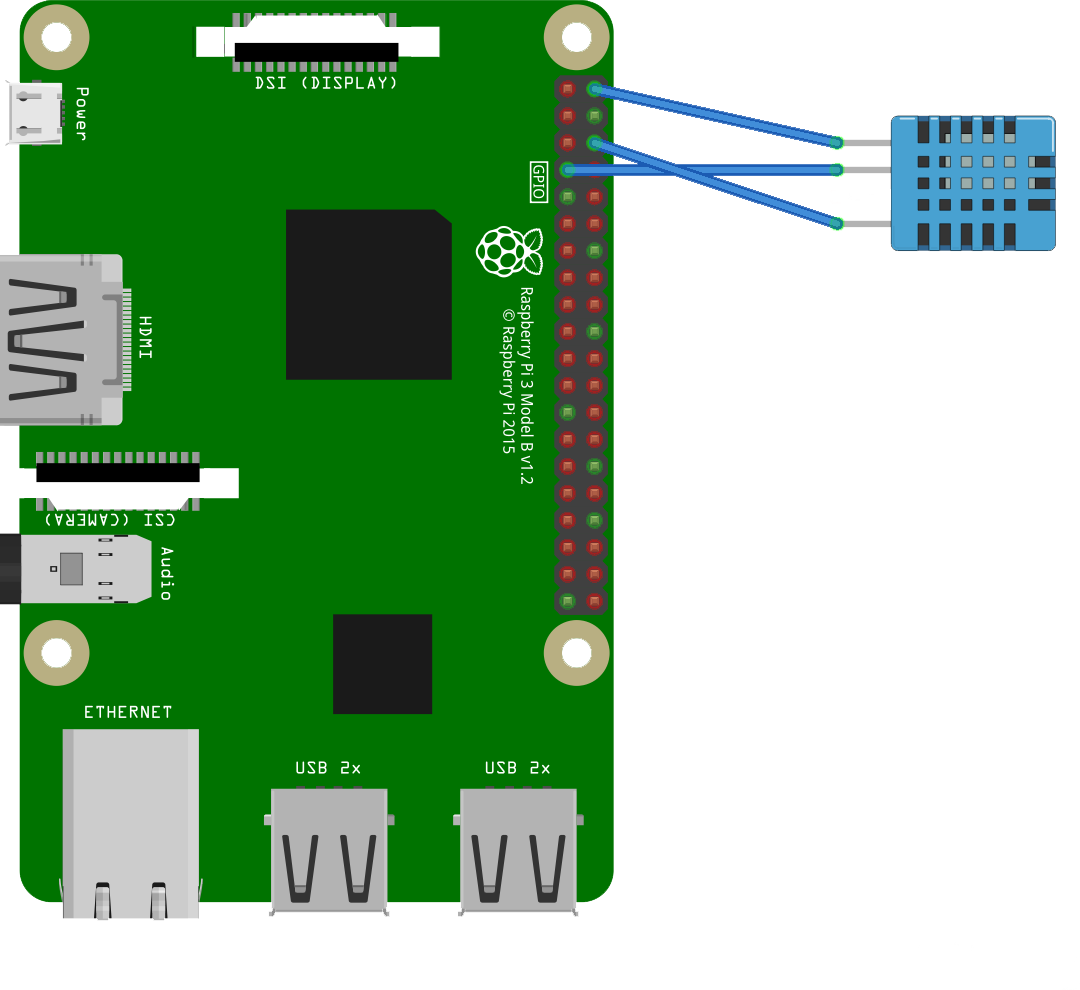
In questa figura potete vedere come collegare i PIN del sensore sul Raspberry
Ora che abbiamo connesso il sensore , procediamo con l'installazione delle librerie necessarie. Per installare le librerie dobbiamo usare un programma client SSH (Per esempio: Putty oppure la shell sul browser).
Eseguiamo questi commandi: Installa alcune dipendenze sul Raspberry:
sudo apt-get update
sudo apt-get install build-essential python-dev python-openssl
Usare Git per clonare il software direttamente sul Raspberry utilizzando il terminale:
git clone https://github.com/adafruit/Adafruit_Python_DHT.git
cd Adafruit_Python_DHT
Ora, per installare la libreria eseguire:
sudo python setup.py install
Sketch ROS
Scriviamo ora un semplice sketch in ROS che ci stampa la temperatura e l'umidità. Importiamo ora le librerie:
import dotbot_ros #libreria di default ROS
import Adafruit_DHT #libreria per il funzionamento del sensore
import sys #libreria per forzare la stampa sulla shell
Codice Completo
import dotbot_ros
import Adafruit_DHT
import sys
class Node(dotbot_ros.DotbotNode):
node_name = 'node'
def setup(self):
sensor = 11
pin = 4
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
print('Temp={0:0.1f}* Humidity={1:0.1f}%'.format(temperature, humidity))
sys.stdout.flush()
Analizziamo il codice:
Nella funzione setup abbiamo la dichiarazione delle variabili sensor e pin. Sensor è il tipo di sensore utilizzato , nel nostro caso è 11 (DHT11). Pin è in numero del pin GPIO sul quale è collegata l'uscita DATA del sensore.
Una volta che le variabili sono state inizializzate , viene lanciata queste funzione che si occupa di leggere i dati ricevuti dal sensore.
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
Successivamente per visualizzare la temperatura e l'umidità , stampiamo questi dati.
print('Temp={0:0.1f}* Humidity={1:0.1f}%'.format(temperature, humidity))
sys.stdout.flush()
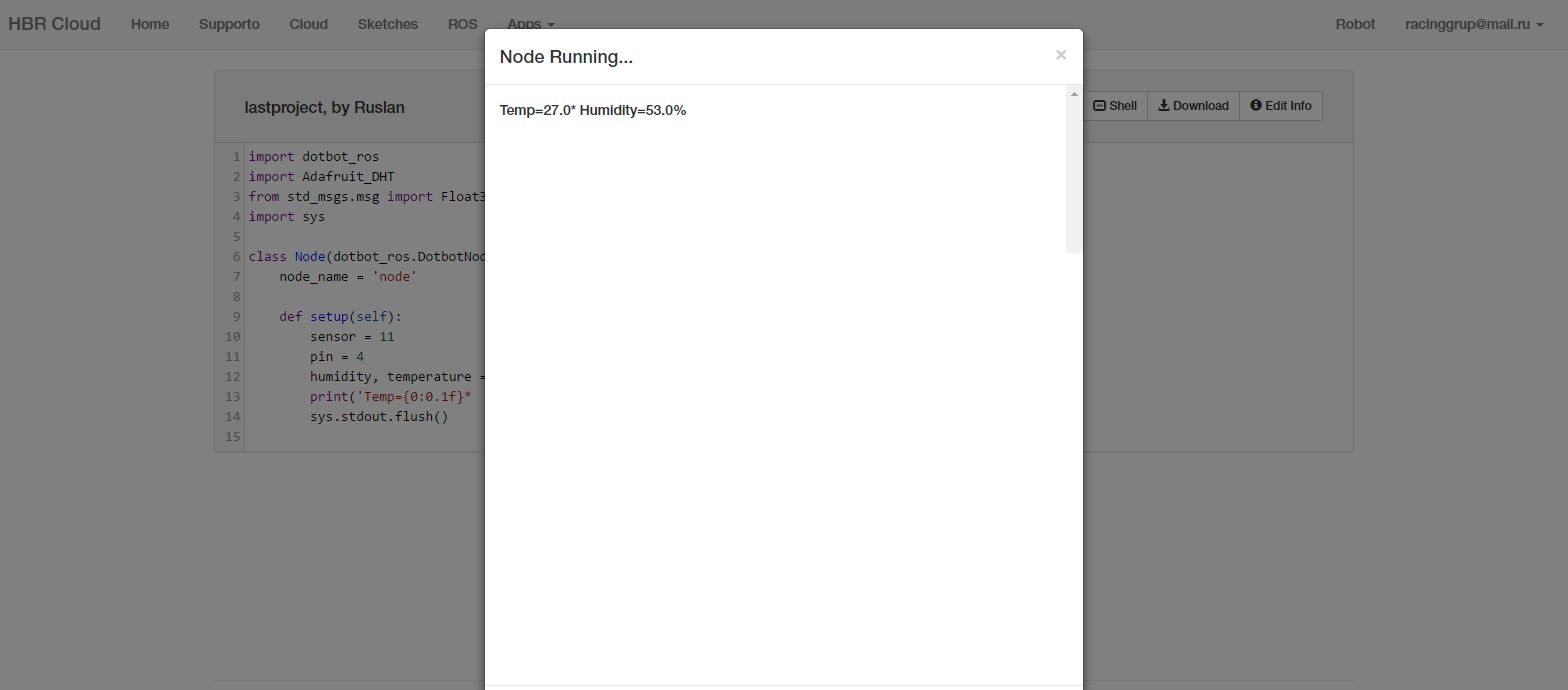
Lanciamo il codice:
Se tutto è andato a buon fine, dobbiamo visualizzare questo output:
Webapp per ricevere i dati dal sensore. Come prima cosa andiamo a sviluppare l'applicazione web , il codice completo lo trovate qui.
Analizziamo il codice HTML: All'interno abbiamo la prima parte del codice , scritto in JavaScript che permette alla WebApp di comunicare con il nostro robottino (riga 136).
<script type="text/javascript">
start_ros(
"192.168.0.108",
"cyberbot",
"192.168.0.108",
"192.168.0.108/bridge/"
);
</script>
IMPORTANTE: ricordate di modificare i campi '192.168.0.108' e 'cyberbot' inserendo l'IP e il nome del robot.
La seconda parte di questo file JavaScript si occupa di sottoscriversi al topic "temperature_status" e ricevere la temperatura espressa in Float32 (riga 140).
<script>
var listener = new ROSLIB.Topic({
ros: ros,
name: "/" + robot.name + "/temperature_status",
messageType: "std_msgs/Float32",
});
listener.subscribe(function temperatura(message) {
document.getElementsByClassName("data")[0].innerHTML = message.data + "°C";
});
</script>
La terza parte del codice JavaScript , si sottoscrive al topic "humidity_status" , riceve un messaggio di tipo Float32, e lo stampa sulla pagina HTML (riga 155).
<script>
var listener = new ROSLIB.Topic({
ros: ros,
name: "/" + robot.name + "/humidity_status",
messageType: "std_msgs/Float32",
});
listener.subscribe(function umidita(message) {
document.getElementsByClassName("data")[1].innerHTML = message.data + "%";
});
</script>
Sketch ROS:
Importiamo le librerie
import dotbot_ros #libreria ROS
import Adafruit_DHT #libreria necessaria per il funzionamento del sensore
from std_msgs.msg import Float32 #serve per pubblicare dati di tipo Float32 sul topic
Nella funzione principale setup , inizializziamo il sensore e il pin , ed creiamo 2 Publisher.
self.sensor = 11
self.pin = 4
self.loop_rate = dotbot_ros.Rate(5)
self.umedita = dotbot_ros.Publisher('humidity_status', Float32)
self.temperatura = dotbot_ros.Publisher('temperature_status', Float32)
Oltre a ciò la funzione setup, chiama la funzione loop passandole la frequenza di esecuzione dotbot_ros.Rate(5).
def loop(self):
humidity, temperature = Adafruit_DHT.read_retry(self.sensor, self.pin)
self.umedita.publish(humidity)
self.temperatura.publish(temperature)
La funzione loop riceve i dati dai sensori e successivamente li pubblica sui Topic.
Codice Completo:
Ecco il codice completo del nostro programma:
import dotbot_ros
import Adafruit_DHT
from std_msgs.msg import Float32
class Node(dotbot_ros.DotbotNode):
node_name = 'node'
def setup(self):
self.sensor = 11
self.pin = 4
self.loop_rate = dotbot_ros.Rate(5)
self.umedita = dotbot_ros.Publisher('humidity_status', Float32)
self.temperatura = dotbot_ros.Publisher('temperature_status', Float32)
def loop(self):
humidity, temperature = Adafruit_DHT.read_retry(self.sensor, self.pin)
self.umedita.publish(humidity)
self.temperatura.publish(temperature)