Implementare un motore d'intelligenza artificale sul vostro bot

In questo tutorial vedremo come implementare l'intelligenza artificiale sul proprio dotbot.
Navigando su internet ho trovato un servizio che mette insieme diverse API tra cui wikipedia, wolframalpha e google assistant. Si tratta del sito https://willbeddow.com il quale unisce tutti questi servizi, e ne crea uno completamente gratuito ed ovviamente senza limiti di richieste.
Come primo passo dobbiamo registrarci qui
Una volta registrati possiamo iniziare a scrivere il codice:
import dotbot_ros
import requests
import json
import sys
class Node(dotbot_ros.DotbotNode):
node_name = 'node'
def setup(self):
server_url = "https://willbeddow.com"
payload = dict(username="USER", password="PASS")
response = requests.post(url="{0}/api/start_session".format(server_url), data=payload).json()
session_id = response["data"]["session_id"]
command_data = dict(session_id=session_id, command="What is the meaning of life?")
answer = requests.post(url="{0}/api/command".format(server_url), data=command_data).json()
print answer["text"]
sys.stdout.flush()
requests.post(url="{0}/api/end_session".format(server_url), data={"session_id": session_id})
IMPORTANTE: ricordate di modificare il campo username e password inserendoli tra i doppi apici.
Analizziamo il codice Come al solito, il nostro programma è composto da un nodo ROS, la funzione principale è la funzione setup, che si occupa di inizializzare il bot .
server_url = "https://willbeddow.com"
payload = dict(username="USER", password="PASS")
Server url è il link dove vengono inviate le richieste di tipo POST. Username e Password sono i dati necessari per l'autorizzazione.
response = requests.post(url="{0}/api/start_session".format(server_url), data=payload).json()
session_id = response["data"]["session_id"]
Inizio di una nuova sessione e creazione del session token.
command_data = dict(session_id=session_id, command="What is the meaning of life?")
answer = requests.post(url="{0}/api/command".format(server_url), data=command_data).json()
Chiamata del metodo POST , il quale invia la domanda e riceve la risposta in formato json.
requests.post(url="{0}/api/end_session".format(server_url), data={"session_id": session_id})
Fine della sessione e disabilitazione del token session.
Una volta implementato il programma, lanciamo il codice!
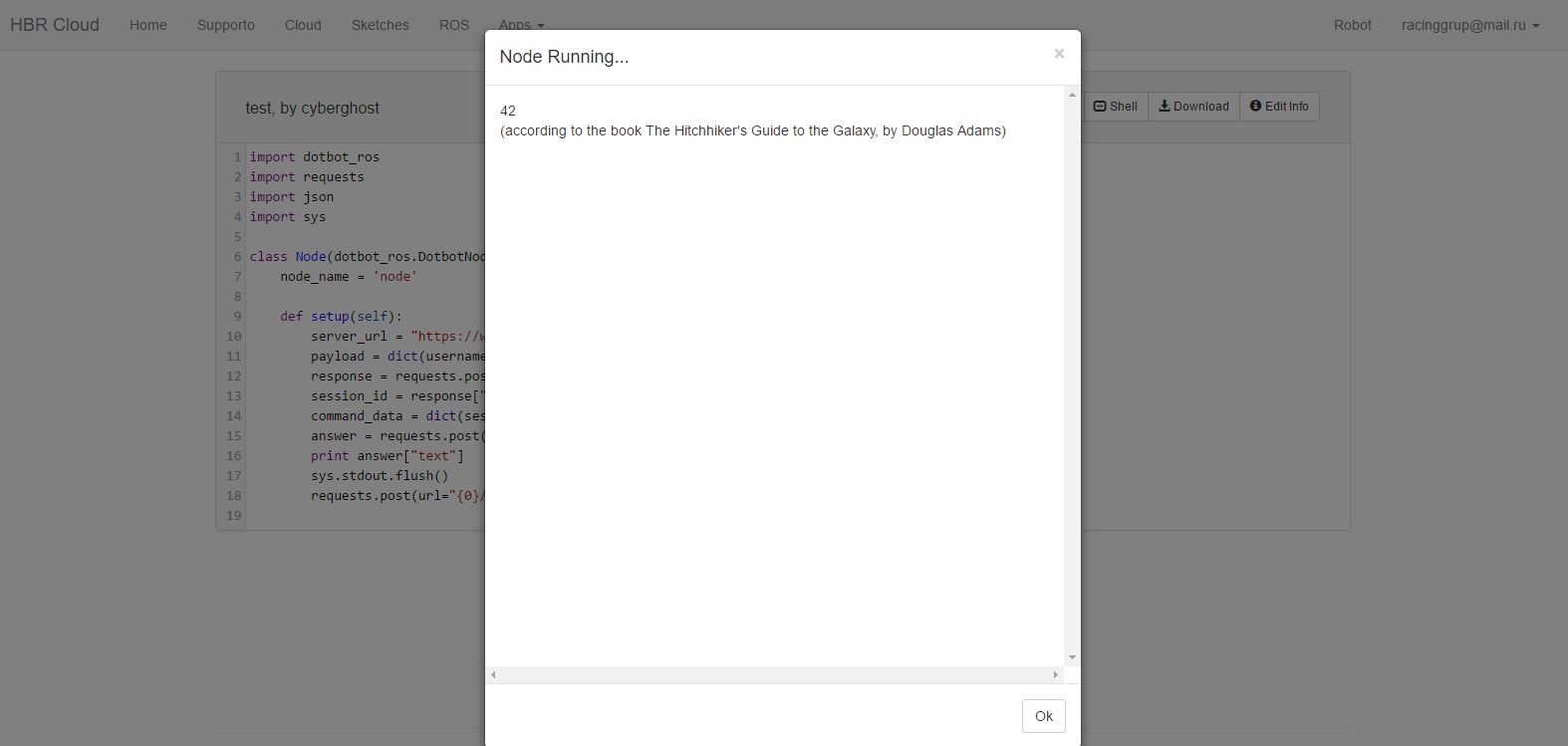
Come vedete il bot ha risposto alla domanda "What is the meaning of life?".
A questo punto, se il bot ha risposto correttamente, implementiamo la lingua italiana attraverso Yandex.Translate.
 Per sviluppare questo progetto ho scelto di usare il traduttore di Yandex e non quello di Google.
Non c'è nessuna differenza tra i due, per quanto riguarda la traduzione, entrambi i traduttori utilizzato lo stesso sistema di traduzione automatica.
Per sviluppare questo progetto ho scelto di usare il traduttore di Yandex e non quello di Google.
Non c'è nessuna differenza tra i due, per quanto riguarda la traduzione, entrambi i traduttori utilizzato lo stesso sistema di traduzione automatica.
Una volta registrati , otteniamo la nostra API.
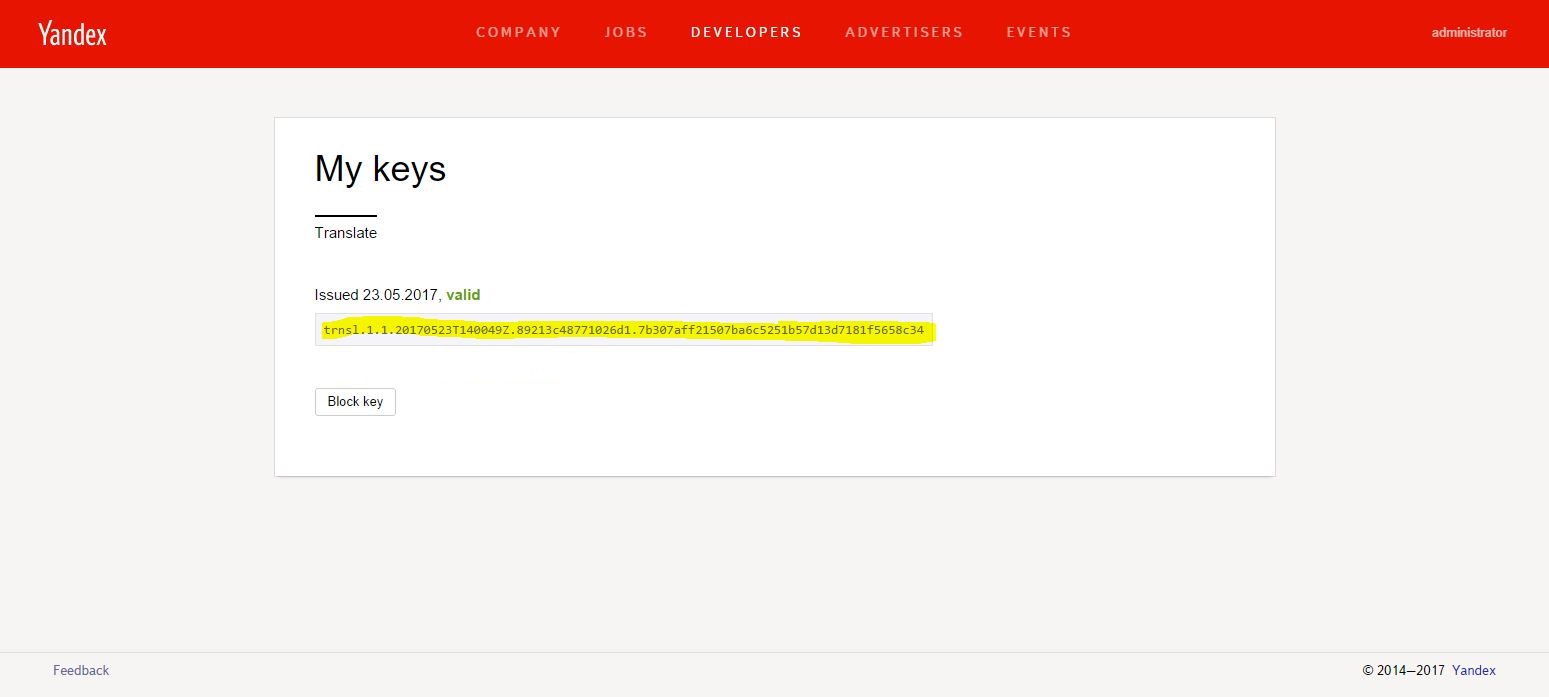
Dopo aver ottenuto la nostra API , installiamo la libreria yandex_translate sul nostro RaspBerry.
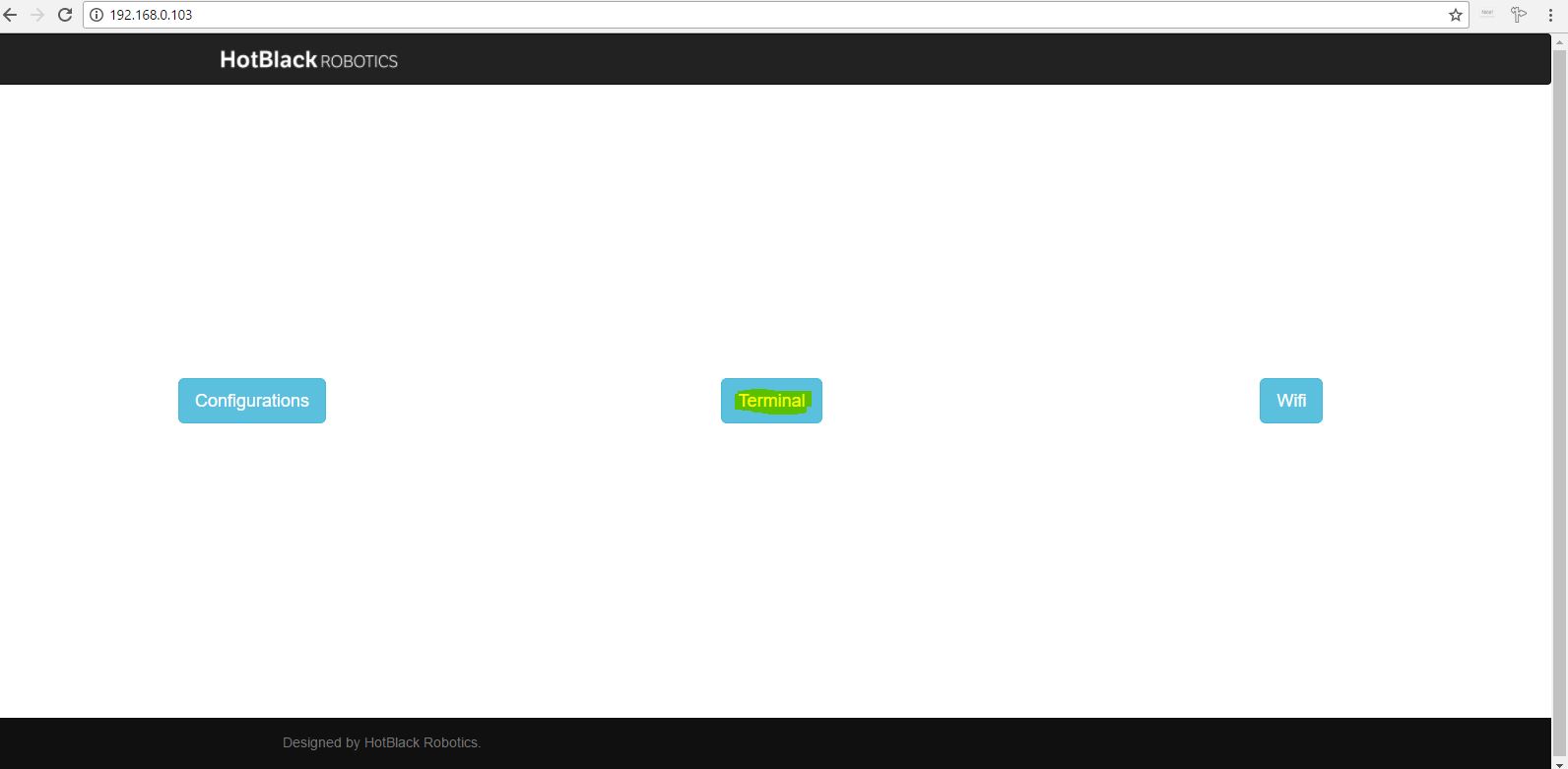
Per installarla, basta andare sull'IP del bot e successivamente fare click su Terminal.
Una volta entrati , la piattaforma chiede i permessi per accedere su quella pagina.
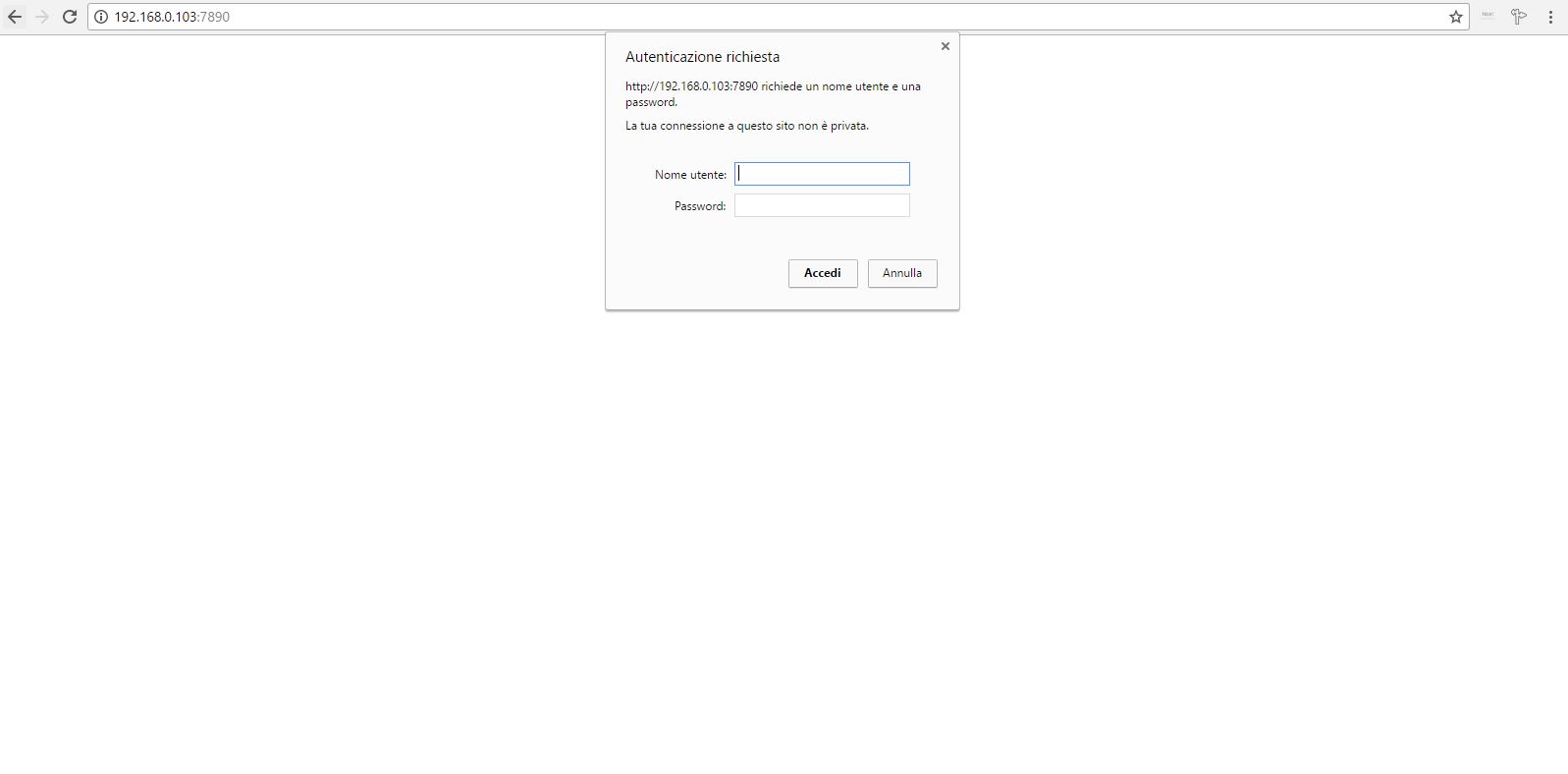 Il nome utente è "hbrain" , e la password è "dotbot".
Il nome utente è "hbrain" , e la password è "dotbot".
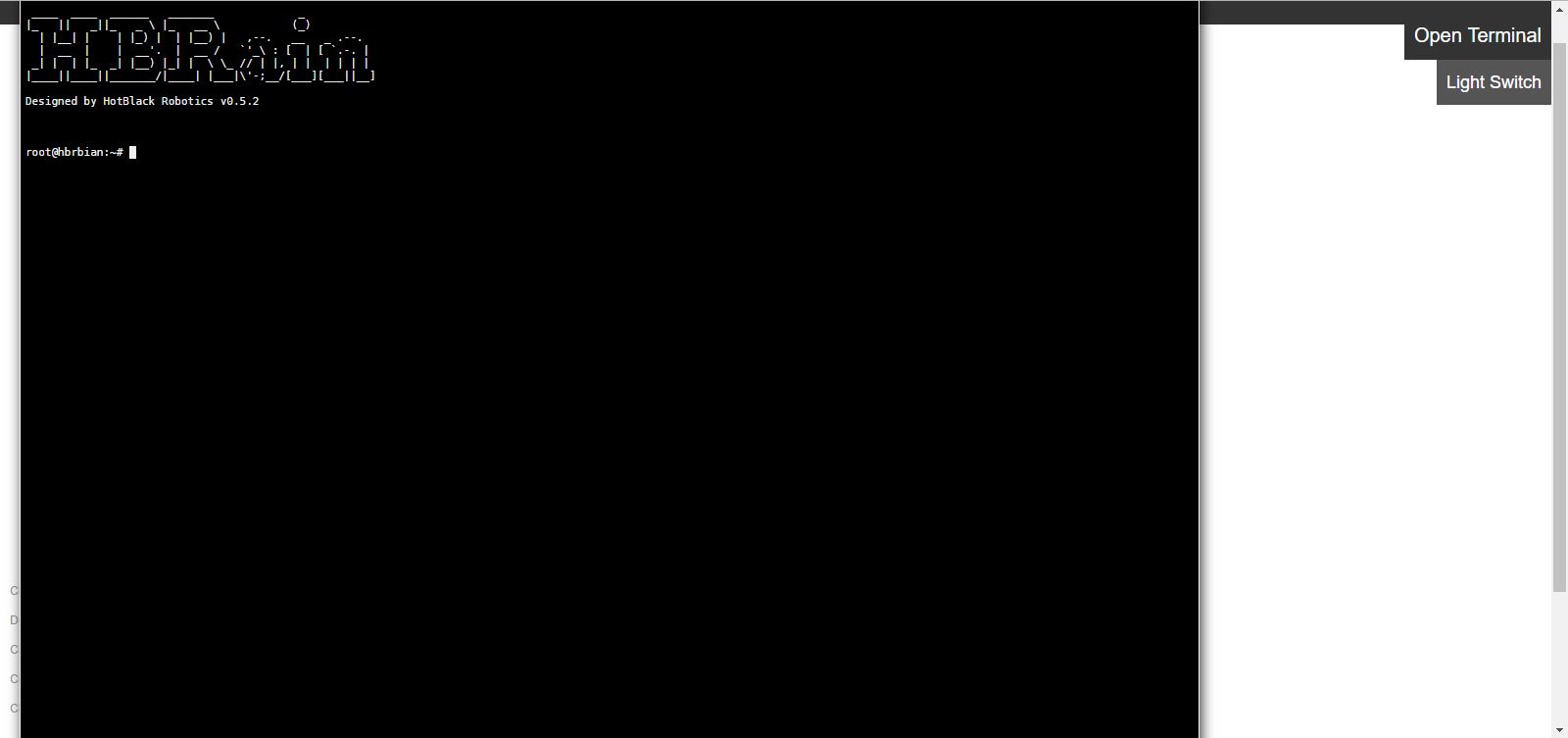
Adesso apriamo il terminale, facendo click su Open Terminal

A questo punto possiamo installare la libreria necessaria.
 Per installarla dobbiamo usare il comando apt-get install "nome libreria" , nel nostro caso è apt-get install yandex_translate.
Per installarla dobbiamo usare il comando apt-get install "nome libreria" , nel nostro caso è apt-get install yandex_translate.
Possiamo iniziare finalmente a programmare :)
Implementiamo il traduttore nel nostro programma:
import dotbot_ros
import requests
import json
import sys
from yandex_translate import YandexTranslate
class Node(dotbot_ros.DotbotNode):
node_name = 'node'
YATOKEN = "trnsl.1.1.20170523T140049Z.89213c48771026d1.7b307aff21507ba6c5251b57d13d7181f5658c34"
def setup(self):
translate = YandexTranslate(self.YATOKEN)
server_url = "https://willbeddow.com"
answer = "Qual e il senso della vita?"
domand = translate.translate(answer.encode('utf-8'), 'it-en')
question = domand['text']
payload = dict(username="USER", password="PASS")
response = requests.post(url="{0}/api/start_session".format(server_url), data=payload).json()
session_id = response["data"]["session_id"]
command_data = dict(session_id=session_id, command=question)
answer = requests.post(url="{0}/api/command".format(server_url), data=command_data).json()
answ = answer["text"]
risp = translate.translate(answ, 'en-it')
risposta = risp['text']
text = risposta[0].encode('utf-8')
print text
sys.stdout.flush()
requests.post(url="{0}/api/end_session".format(server_url), data={"session_id": session_id})
Come avete visto ci sono servite solo qualche righe di codice per tradurre la domanda dall'italiano in inglese.
YATOKEN = "IL TUO YANDEX TOKEN"
Nella funzione setup il token viene chiamato da:
translate = YandexTranslate(self.YATOKEN)
La variabile "domand" riceve un messaggio (tradotto dall'italiano in inglese) in formato Json e viene transformato in una stringa.
domand = translate.translate(answer.encode('utf-8'), 'it-en')
question = domand['text']
La stessa cosa è uguale per la risposta:
risp = translate.translate(answ, 'en-it')
risposta = risp['text']
La risposta viene tradotta dal inglese in italiano e viene trasformata in una stringa.
Una volta eseguito il codice abbiamo in output questa finestra:
Ora trasformiamo questo programma in una ChatBot (Telegram). Per farlo basta creare un bot seguendo questa guida. A questo punto, ottenuto il Token , implementiamolo nel nostro codice.
import dotbot_ros
import telepot
import sys
from yandex_translate import YandexTranslate
import requests
import json
class Node(dotbot_ros.DotbotNode):
node_name = 'bot'
TOKEN = "INSERISCI QUI IL TUO TOKEN TELEGRAM"
YATOKEN = "trnsl.1.1.20170523T140049Z.89213c48771026d1.7b307aff21507ba6c5251b57d13d7181f5658c34"
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
self.server_url = "https://willbeddow.com"
self.payload = dict(username="USER", password="PASS")
self.translate = YandexTranslate(self.YATOKEN)
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
nome = msg['from']['first_name']
domanda = msg['text']
domand = self.translate.translate(domanda.encode('utf-8'), 'it-en') #traduzione da italiano in inglese
question = domand['text'] #decodifico le api
response = requests.post(url="{0}/api/start_session".format(self.server_url), data=self.payload).json() #viene creata una nuova sessione
session_id = response["data"]["session_id"] #viene creata la session id
command_data = dict(session_id=session_id, command=question)
answer = requests.post(url="{0}/api/command".format(self.server_url), data=command_data).json()
answ = answer["text"]
risp = self.translate.translate(answ, 'en-it')
risposta = risp['text']
text = risposta[0].encode('utf-8') #decode da unicode in utf8
requests.post(url="{0}/api/end_session".format(self.server_url), data={"session_id": session_id}) #la sessione viene chiusa
self.bot.sendMessage(chat_id, text) #viene inviata la risposta
print msg
sys.stdout.flush()
Analizziamo il codice:
self.bot = telepot.Bot(self.TOKEN)
Crea il bot utilizzando il token inizializzato
self.bot.message_loop(self.handle)
Ogni volta che il bot riceve un messaggio , viene chiamata la funzione handle
Alla funzione handle viene passato il parametro msg.
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
nome = msg['from']['first_name']
domanda = msg['text']
domand = self.translate.translate(domanda.encode('utf-8'), 'it-en') #traduzione da italiano in inglese
question = domand['text'] #decodifico le api
response = requests.post(url="{0}/api/start_session".format(self.server_url), data=self.payload).json() #viene creata una nuova sessione
session_id = response["data"]["session_id"] #viene creata la session id
command_data = dict(session_id=session_id, command=question)
answer = requests.post(url="{0}/api/command".format(self.server_url), data=command_data).json()
answ = answer["text"]
risp = self.translate.translate(answ, 'en-it')
risposta = risp['text']
text = risposta[0].encode('utf-8') #decode da unicode in utf8
requests.post(url="{0}/api/end_session".format(self.server_url), data={"session_id": session_id}) #la sessione viene chiusa
self.bot.sendMessage(chat_id, text) #viene inviata la risposta
print msg
sys.stdout.flush()
content_type, chat_type, chat_id = telepot.glance(msg)
Questa riga si occupa di estrarre il chat_id che si occupa di gestire più chat contemporaneamente e content_type: il tipo di dati contenuti nell'messaggio.
nome = msg['from']['first_name']
domanda = msg['text']
Estraiamo il nome dell'utente che sta scrivendo al bot e la sua domanda.
Una volta generata la risposta , viene inviata all'utente:
self.bot.sendMessage(chat_id, text)
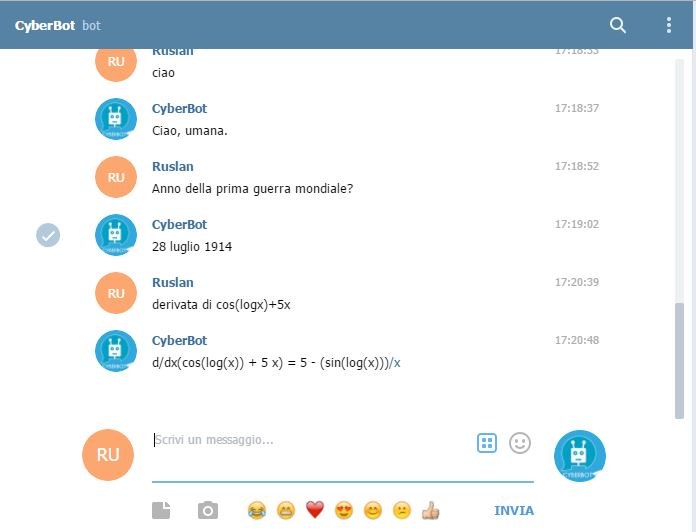
Lanciamo il codice completo e vediamo il suo funzionamento:
Ma se volessimo farlo pure muovere da telegram? Il nuovo codice implementato è il seguete:
import dotbot_ros
import telepot
from gpiozero import Robot
import sys
from yandex_translate import YandexTranslate
import requests
import json
import time
from telepot.namedtuple import ReplyKeyboardMarkup, KeyboardButton
class Node(dotbot_ros.DotbotNode):
node_name = 'bot'
TOKEN = "INSERISCI QUI IL TUO TOKEN TELEGRAM"
YATOKEN = "trnsl.1.1.20170523T140049Z.89213c48771026d1.7b307aff21507ba6c5251b57d13d7181f5658c34"
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
self.server_url = "https://willbeddow.com"
self.payload = dict(username="USER", password="PASS")
self.translate = YandexTranslate(self.YATOKEN)
self.robot = Robot(left=(9,10), right=(7,8))
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
nome = msg['from']['first_name']
domanda = msg['text']
if domanda[0] == '/':
self.bot.sendMessage(chat_id, 'scegli una delle voci', reply_markup=ReplyKeyboardMarkup(
keyboard=[
[KeyboardButton(text="/avanti"), KeyboardButton(text="/dietro")],
[KeyboardButton(text="/destra"), KeyboardButton(text="/sinistra")],
[KeyboardButton(text="/stop")]
]
))
if domanda == '/start':
self.bot.sendMessage(chat_id, "ciao, " + nome + " benvenuto nella mia chat!")
elif domanda == '/avanti':
self.bot.sendMessage(chat_id, "ok, vado avanti")
self.robot.forward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/dietro':
self.bot.sendMessage(chat_id, "ok, vado dietro")
self.robot.backward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/destra':
self.bot.sendMessage(chat_id, "ok, giro a destra")
self.robot.right()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/sinistra':
self.bot.sendMessage(chat_id, "ok, giro a sinistra")
self.robot.left()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/stop':
self.robot.stop()
else:
self.bot.sendMessage(chat_id, "scusa, non capisco questo comando")
else:
domand = self.translate.translate(domanda.encode('utf-8'), 'it-en') #traduzione da italiano in inglese
question = domand['text'] #decodifico le api
response = requests.post(url="{0}/api/start_session".format(self.server_url), data=self.payload).json() #viene creata una nuova sessione
session_id = response["data"]["session_id"] #viene creata la session id
command_data = dict(session_id=session_id, command=question)
answer = requests.post(url="{0}/api/command".format(self.server_url), data=command_data).json()
answ = answer["text"]
risp = self.translate.translate(answ, 'en-it')
risposta = risp['text']
text = risposta[0].encode('utf-8') #decode da unicode in utf8
requests.post(url="{0}/api/end_session".format(self.server_url), data={"session_id": session_id}) #la sessione viene chiusa
self.bot.sendMessage(chat_id, text) #viene inviata la risposta
print msg
sys.stdout.flush()
Analizziamo il codice
Nella funzione setup abbiamo:
self.robot = Robot(left=(9,10), right=(7,8))
Qui si crea un oggetto Robot, il quale permette di gestire i motori e quindi farli muovere. IMPORTANTE: ricordate di modificare i campi "(left=(9,10), right=(7,8))" con i vostri PIN dei motori.
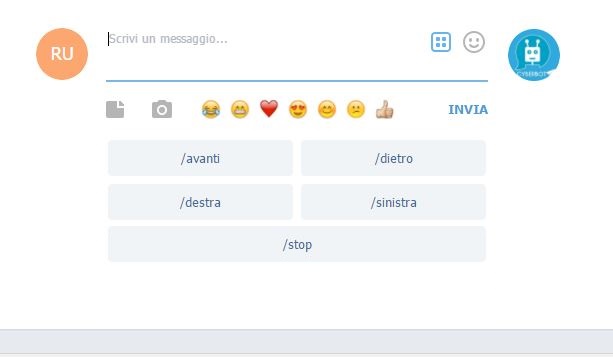
self.bot.sendMessage(chat_id, 'scegli una delle voci', reply_markup=ReplyKeyboardMarkup(
keyboard=[
[KeyboardButton(text="/avanti"), KeyboardButton(text="/dietro")],
[KeyboardButton(text="/destra"), KeyboardButton(text="/sinistra")],
[KeyboardButton(text="/stop")]
]
))
Si occupa di dare i suggerimenti all'utente dei comandi disponibili.
elif domanda == '/avanti':
self.bot.sendMessage(chat_id, "ok, vado avanti")
self.robot.forward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/dietro':
self.bot.sendMessage(chat_id, "ok, vado dietro")
self.robot.backward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/destra':
self.bot.sendMessage(chat_id, "ok, giro a destra")
self.robot.right()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/sinistra':
self.bot.sendMessage(chat_id, "ok, giro a sinistra")
self.robot.left()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/stop':
self.robot.stop()
else:
self.bot.sendMessage(chat_id, "scusa, non capisco questo comando")
Questa parte permette di muovere il bot nelle 4 direzioni.
time.sleep(0.25)
Gestisce il tempo dell'esecuzione del comando.
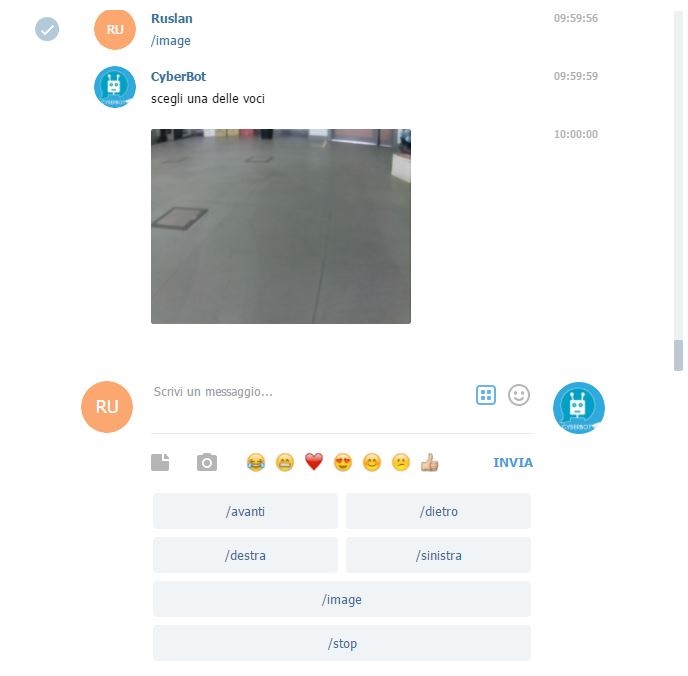
Se avete la picam e volete fare pure le foto attraverso il Raspberry , allora implementate questo piccolo codice:
elif domanda == '/image':
img_str = cv2.imencode('.jpg', self.img)[1].tostring()
self.bot.sendPhoto(chat_id('image.jpg',StringIO.StringIO(img_str)))
Vediamo a questo punto il codice finale:
import dotbot_ros
import telepot
from gpiozero import Robot
import sys
import cv2
import time
from std_msgs.msg import String
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import StringIO
from mtranslate import translate
from yandex_translate import YandexTranslate
import requests
import json
from telepot.namedtuple import ReplyKeyboardMarkup, KeyboardButton
class Node(dotbot_ros.DotbotNode):
node_name = 'bot'
TOKEN = "INSERISCI QUI IL TUO TOKEN TELEGRAM"
YATOKEN = "trnsl.1.1.20170523T140049Z.89213c48771026d1.7b307aff21507ba6c5251b57d13d7181f5658c34"
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
self.image_sub = dotbot_ros.Subscriber("/camera/image",Image,self.callback)
self.img = None
self.bridge = CvBridge()
self.shape = None
self.image = None
self.server_url = "https://willbeddow.com"
self.payload = dict(username="USER", password="PASS")
self.translate = YandexTranslate(self.YATOKEN)
self.robot = Robot(left=(9,10), right=(7,8))
def callback(self,data):
self.img = self.bridge.imgmsg_to_cv2(data, "bgr8")
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
nome = msg['from']['first_name']
domanda = msg['text']
if domanda[0] == '/':
self.bot.sendMessage(chat_id, 'scegli una delle voci', reply_markup=ReplyKeyboardMarkup(
keyboard=[
[KeyboardButton(text="/avanti"), KeyboardButton(text="/dietro")],
[KeyboardButton(text="/destra"), KeyboardButton(text="/sinistra")],
[KeyboardButton(text="/image")],[KeyboardButton(text="/stop")]
]
))
if domanda == '/start':
self.bot.sendMessage(chat_id, "ciao, " + nome + " benvenuto nella mia chat!")
elif domanda == '/image':
img_str = cv2.imencode('.jpg', self.img)[1].tostring()
self.bot.sendPhoto(chat_id,('image.jpg', StringIO.StringIO(img_str)))
elif domanda == '/avanti':
self.bot.sendMessage(chat_id, "ok, vado avanti")
self.robot.forward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/dietro':
self.bot.sendMessage(chat_id, "ok, vado dietro")
self.robot.backward()
time.sleep(0.25)
self.robot.stop()
elif domanda == '/destra':
self.bot.sendMessage(chat_id, "ok, giro a destra")
self.robot.right()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/sinistra':
self.bot.sendMessage(chat_id, "ok, giro a sinistra")
self.robot.left()
time.sleep(0.2)
self.robot.stop()
elif domanda == '/stop':
self.robot.stop()
else:
self.bot.sendMessage(chat_id, "scusa, non capisco questo comando")
else:
domand = self.translate.translate(domanda.encode('utf-8'), 'it-en') #traduzione da italiano in inglese
question = domand['text'] #decodifico le api
response = requests.post(url="{0}/api/start_session".format(self.server_url), data=self.payload).json() #viene creata una nuova sessione
session_id = response["data"]["session_id"] #viene creata la session id
command_data = dict(session_id=session_id, command=question)
answer = requests.post(url="{0}/api/command".format(self.server_url), data=command_data).json()
answ = answer["text"]
risp = self.translate.translate(answ, 'en-it')
risposta = risp['text']
text = risposta[0].encode('utf-8') #decode da unicode in utf8
requests.post(url="{0}/api/end_session".format(self.server_url), data={"session_id": session_id}) #la sessione viene chiusa
self.bot.sendMessage(chat_id, text) #viene inviata la risposta
print msg
sys.stdout.flush()
Adesso il nostro bot riesce a rispondere a qualsiasi domanda, muoversi e infine fare foto.