Tutorial - Sviluppiamo un Bot Telegram in ROS

In questo tutorial vedremo come creare un semplice bot telegram in grado di controllare un robot in cloud.
Cosa serve?
Per sviluppare questo progetto, vi servirà essere iscritti alla nostra piattaforma ed avere a disposizione un robot reale o virtuale.
Questa volta, useremo un robot reale per dialogare con il robot! Ad ogni modo, potrete comunque richiedere il vostro robot virtuale per fare prove! Se volete utilizzare un robot virtuale scriveteci a info@hotblackrobotics.com!
Per prima cosa, è importate iscriversi alla piattaforma e collegarsi al robot, potete seguire le istruzioni all'inizio di questo tutorial.
Creazione di un Bot Telegram
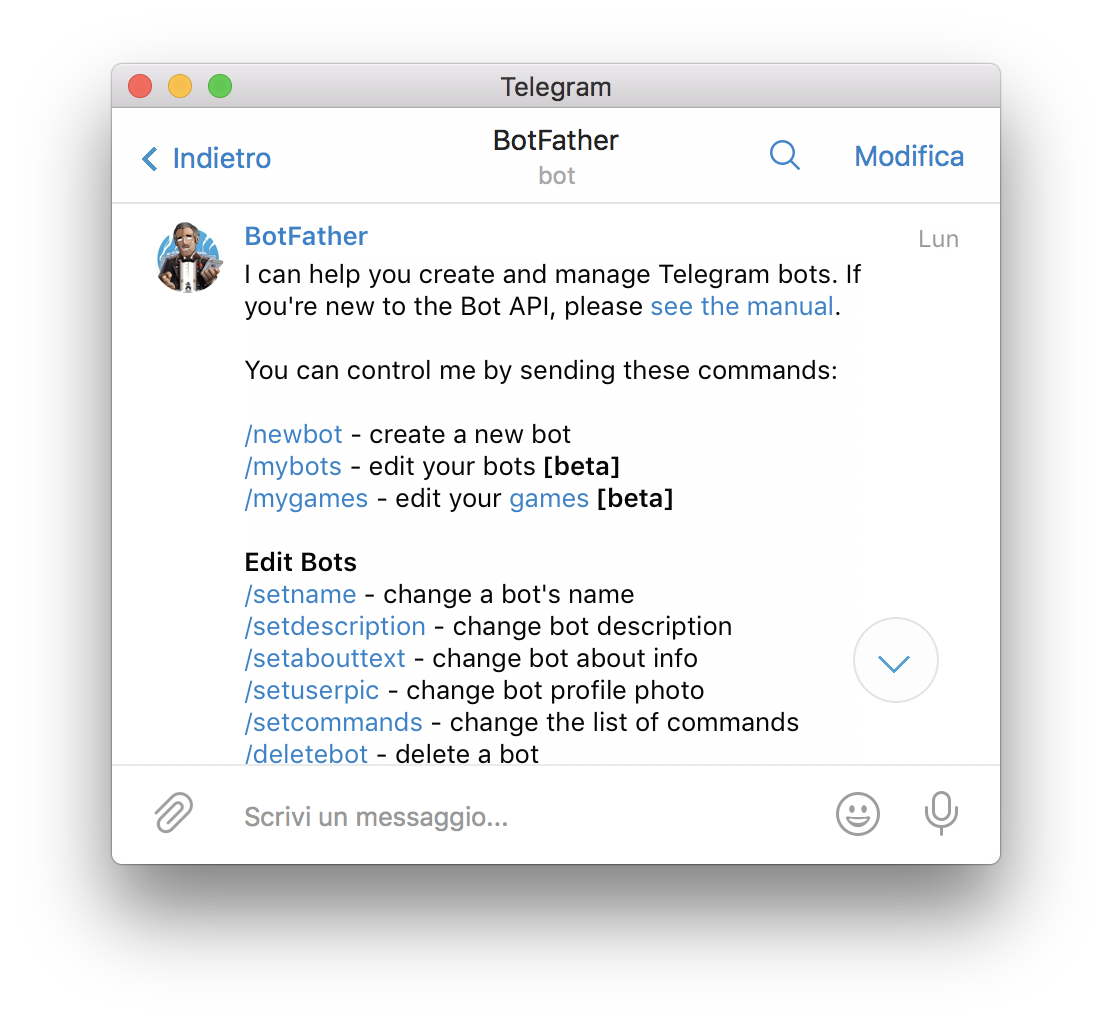
Per prima cosa, è necessario configurare un bot telegram! Per farlo, telegram mette a disposizione un bot (chiamato BotFather) in grado di creare altri bot.
Assicuriamoci di aver installato telegram sul nostro dispositivo e accediamo al BotFather cliccando qui. Una volta aperta la chat con BotFather lui ci informerà (in inglese) sulle azioni che possiamo fare.
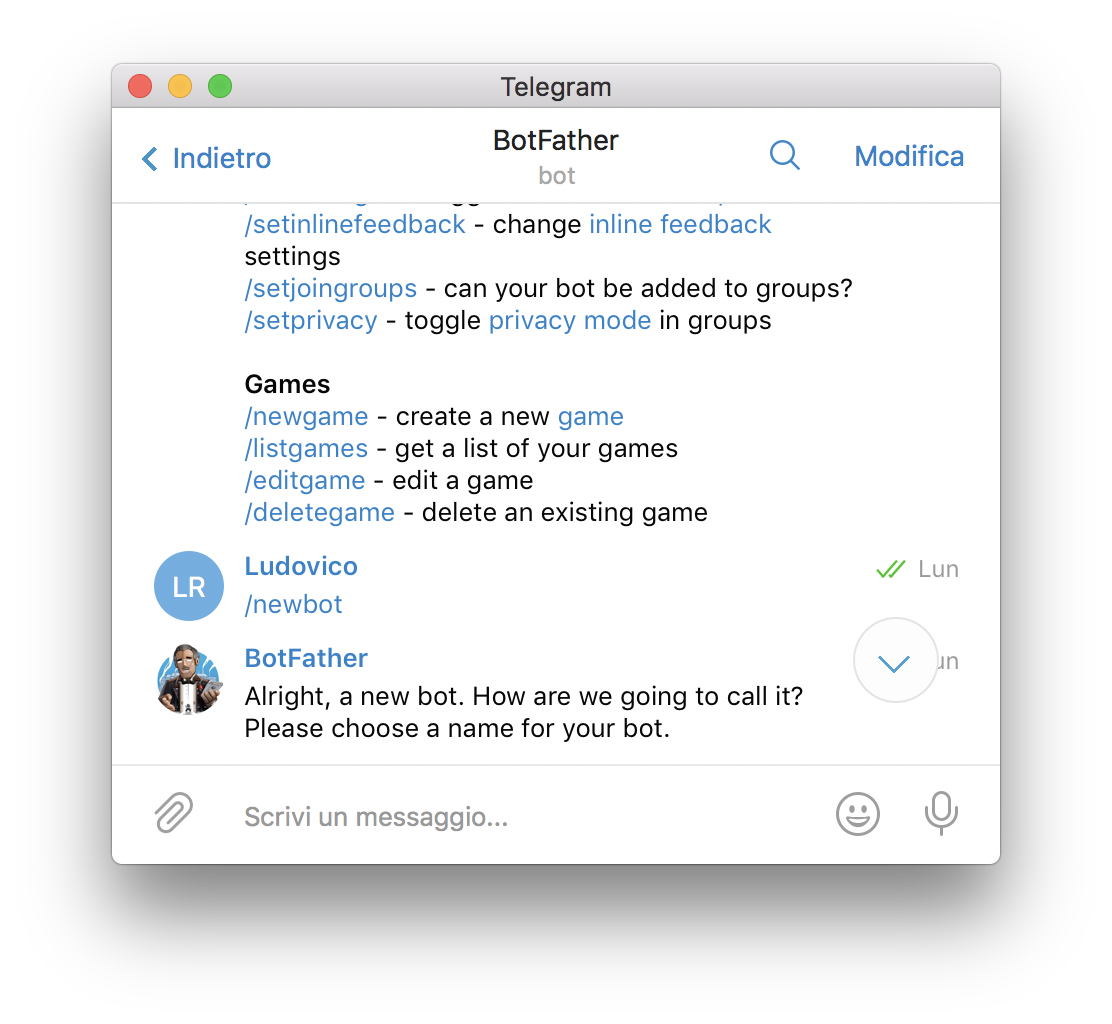
Per creare un nuovo bot, inviamo il comando /newbot, a cui il BotFather risponderà chiedendo che nome dare al proprio bot
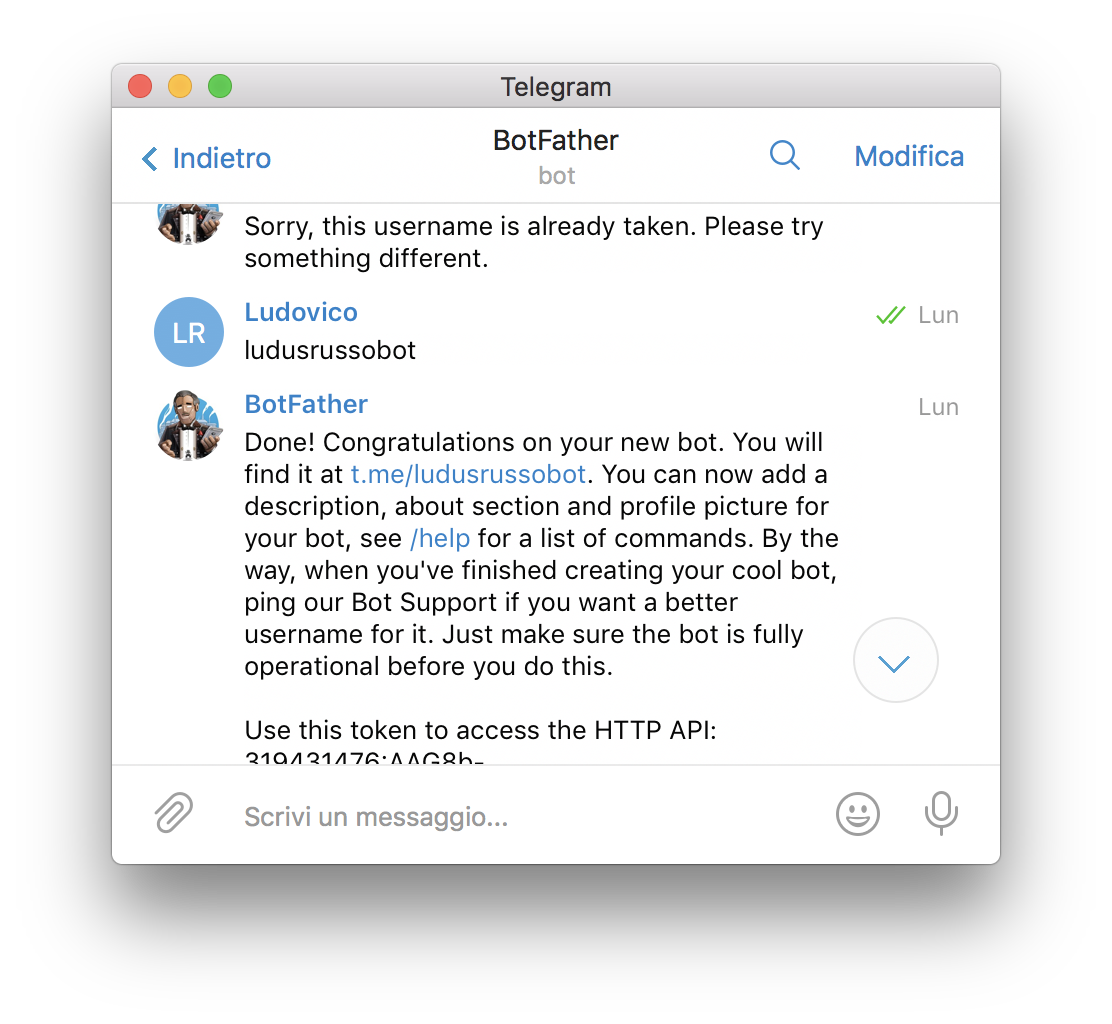
Una volta scelto il nome (BotFather ci informa se il nome è già stato preso), verrà creato il nostro bot e ci verranno fornite due informazioni essenziali:
- l'URL del bot, grazia al quale potremmo aprire la chat
- il Token del bot (da mantenere segreto) che servirà per sviluppare il codice.
Una volta creato il bot, cliccando sull'URL, potremmo aprire la chat! Ovviamente adesso non succederà nulla perchè il bot non è ancora stato implementato.
Creazione del nostro programma
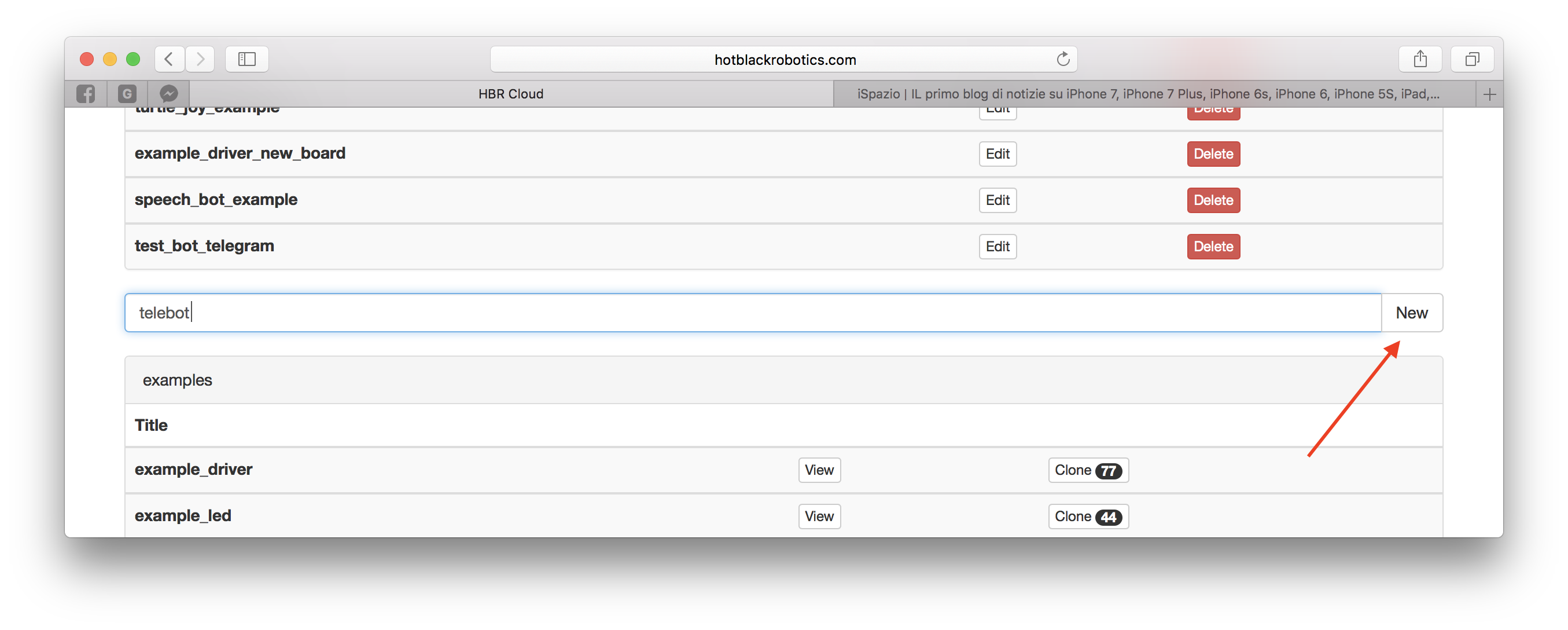
Una volta connessi, creiamo un nuovo programma chiamato telebot, seguendo le istruzioni di seguito.
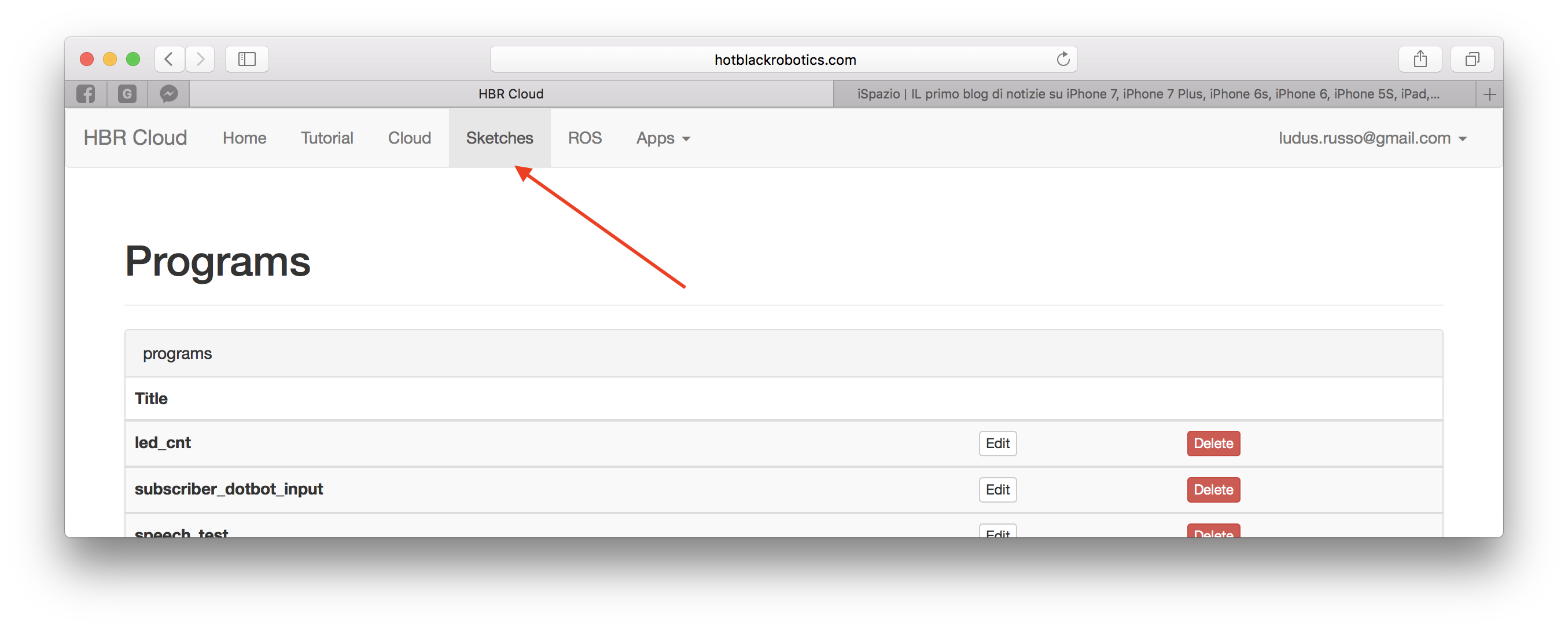
Dopo esserci loggati in piattaforma, apriamo il tab sketches.
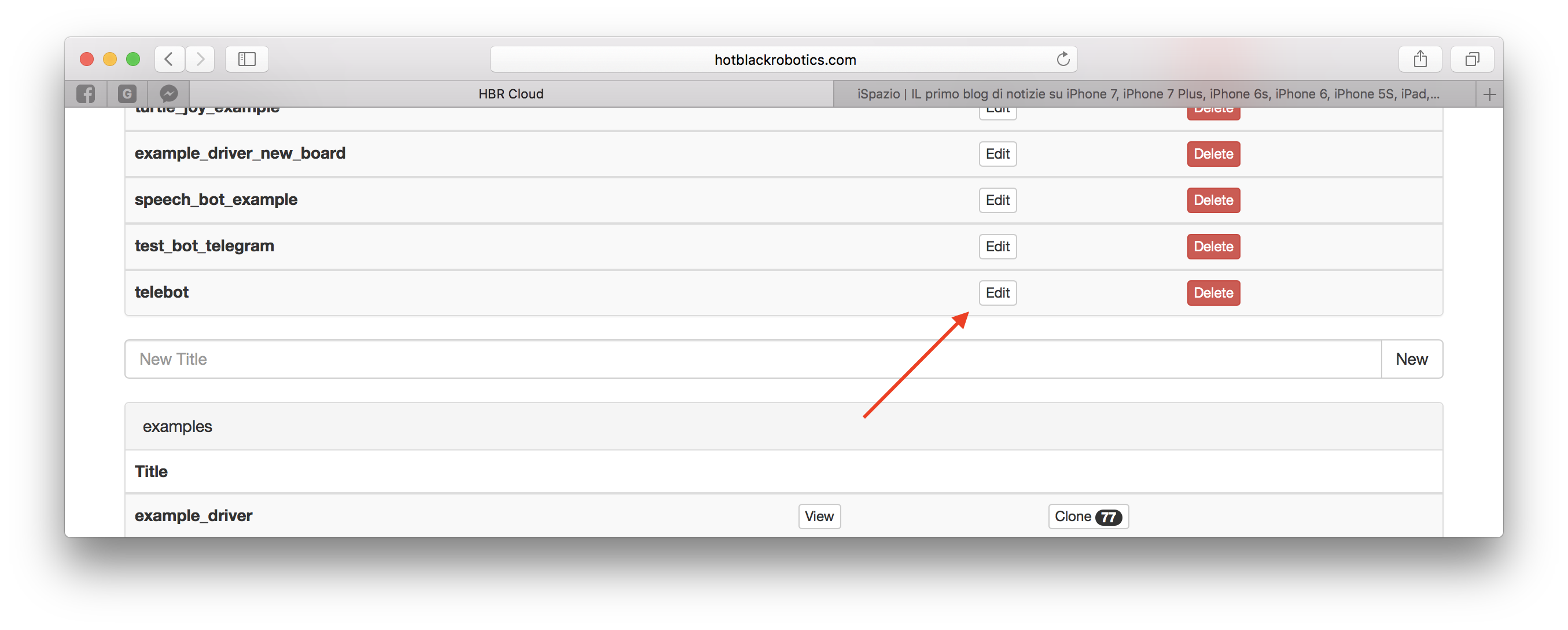
Creiamo un nuovo sketch e apriamolo
Implementiamo un semplice Bot
A questo punto, siamo pronti ad implementare un semplicissimo bot che risponde alla nostra chat. Nel programma appena crato, implementiamo il seguente codice.
import dotbot_ros
import telepot
import sys
class Node(dotbot_ros.DotbotNode):
node_name = 'bot'
TOKEN = "INSERISCI QUI IL TUO TOKEN"
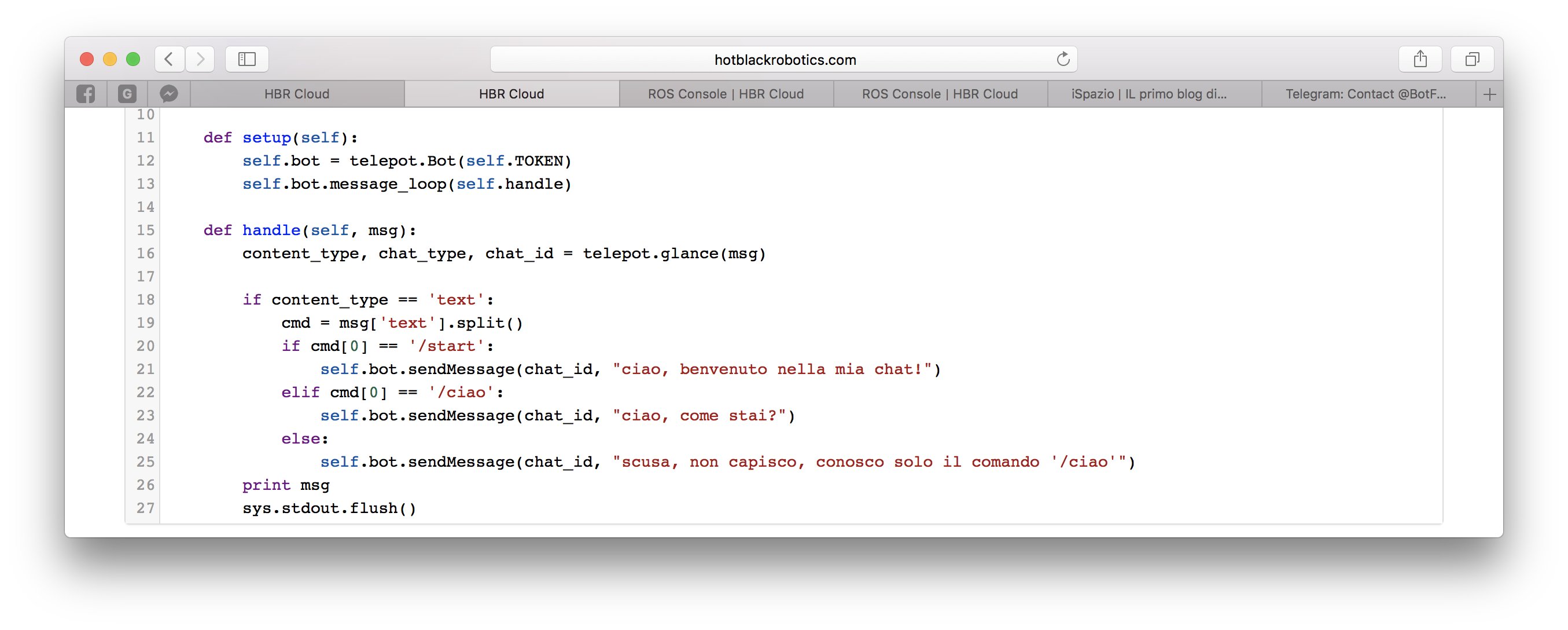
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
if content_type == 'text':
cmd = msg['text'].split()
if cmd[0] == '/start':
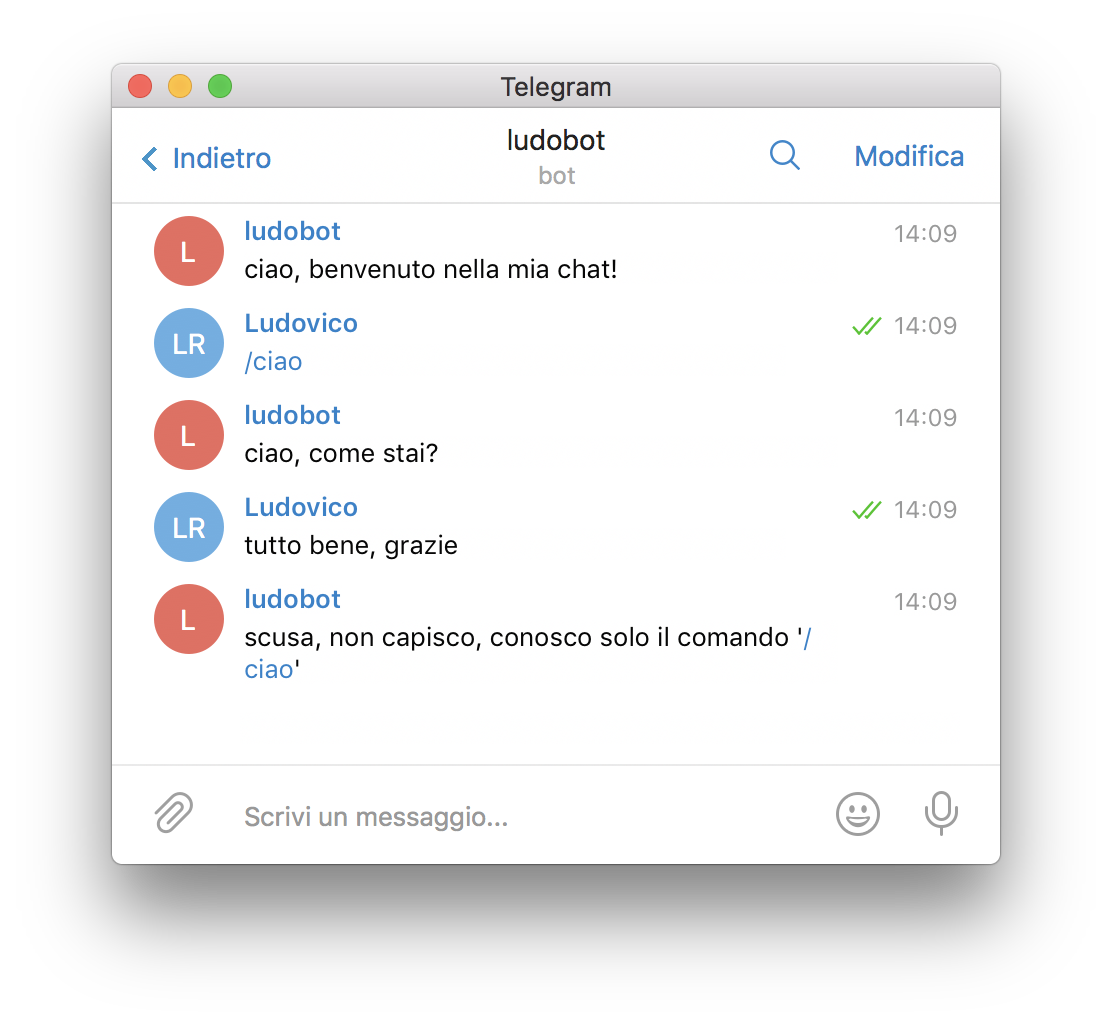
self.bot.sendMessage(chat_id, "ciao, benvenuto nella mia chat!")
elif cmd[0] == '/ciao':
self.bot.sendMessage(chat_id, "ciao, come stai?")
else:
self.bot.sendMessage(chat_id, "scusa, non capisco, conosco solo il comando '/ciao'")
print msg
sys.stdout.flush()
IMPORTANTE: ricordate di modificare la linea TOKEN = "INSERISCI QUI IL TUO TOKEN" inserendo il token del vostro robot tra i doppi apici
Una volta implementato il programma, salviamo e lanciamo il codice! A questo punto, se tutto va bene, potremmo aprire la chat telegram col nostro bot e iniziare a dialogare con lui!
Analizziamo il codice
Come al solito, il nostro programma è composto da un nodo ROS, la funzione princiapale è la funzione setup, che si occupa di inizializzare il bot e creare una callback di gestione.
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
In particolare, la linea self.bot = telepot.Bot(self.TOKEN) crea il bot utilizzando il nostro token, mentre la seconda linea self.bot.message_loop(self.handle) dice che, ogni volta che un nuovo messaggio viene mandato al bot, bisogna chiamare la funzione self.handle.
La funzione handle, quindi, viene chiamata quando un nuovo messaggi è mandato alla nostra chat, ed.è implementata come segue:
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
if content_type == 'text':
cmd = msg['text'].split()
if cmd[0] == '/start':
self.bot.sendMessage(chat_id, "ciao, benvenuto nella mia chat!")
elif cmd[0] == '/ciao':
self.bot.sendMessage(chat_id, "ciao, come stai?")
else:
self.bot.sendMessage(chat_id, "scusa, non capisco, conosco solo il comando '/ciao'")
print msg
sys.stdout.flush()
Alla funzione viene passato come parametro il messaggio mandato alla chat, contenuto nella variabile msg.
Per prima cosa, è necessario estrarre informaizoni utili dalla chat, in particolare il chat_id (che identifica univocamente la chat aperta, in modo che il bot possa gestire più chat contemporaneamente), e il content_type, cioè il tipo di dati contenuti nel messaggio.
Questa operazione viene fatta dalla riga content_type, chat_type, chat_id = telepot.glance(msg).
A questo punto, dobbiamo verificare che il messaggio sia di tipo testuale (il bot al momento non sa gestire immagini, video o file). Facciamo quindi il check if content_type == 'text':.
Se il messaggio è di tipo testuale, possiamo andare ad analizzarlo. Il messaggio sarà contenuto in una stringa msg['text'] di testo. Possiamo dividere la stringa nelle parole contenute utilizzando il metodo plit(), come nella riga cmd = msg['text'].split(). In questo modo, se la stringa è "ciao come stai?", la variabile cmd sarà uguale a ['ciao', 'come', 'stai?'].
Ora possiamo analizzare la prima parola, rispondendo in modo diverso in base al valore di questa. Al momento, il robot risponde solamente a due parole: /ciao e /start (notare lo /). Questo viene fatto all'interno del costrutto if ... elif ... else.
Per rispondere alla chat, utilizziamo il la riga self.bot.sendMessage(chat_id, "ciao, come stai?") , dove il primo parametro è l'id della chat stessa, mentre il secondo parametro è la stringa da mandare.
Esercizio
Provate ad implemntare altri comandi!
Controlliamo il robot da chat telegram!
Una volta capito come mandare comandi al robot, possiamo tranquillamente implementare dei comandi per farlo muovere. Per farlo, bisogna modificare il nostro programma come segue.
- Importare dalla libreria gpiozero l'oggetto Robot
- Creare un oggetto
Robotnella funzione disetup - Implementare i comandi nel costrutto
if ... elif ... else - Nei nuovi comandi, controllare i motori tramite l'oggetto Robot.
Il nuovo codice implementato è il seguente
import dotbot_ros
import telepot
from gpiozero import Robot
import time
import sys
class Node(dotbot_ros.DotbotNode):
node_name = 'bot'
TOKEN = "INSERISCI QUI IL TUO TOKEN"
def setup(self):
self.bot = telepot.Bot(self.TOKEN)
self.bot.message_loop(self.handle)
self.robot = Robot(left=(9, 10), right=(7, 8))
def handle(self, msg):
content_type, chat_type, chat_id = telepot.glance(msg)
if content_type == 'text':
cmd = msg['text'].split()
if cmd[0] == '/start':
self.bot.sendMessage(chat_id, "ciao, benvenuto nella mia chat!")
elif cmd[0] == '/ciao':
self.bot.sendMessage(chat_id, "ciao, come stai?")
elif cmd[0] == '/avanti':
self.bot.sendMessage(chat_id, "ok, vado avanti")
self.robot.forward()
time.sleep(0.5)
self.robot.stop()
elif cmd[0] == '/dietro':
self.bot.sendMessage(chat_id, "ok, vado dietro")
self.robot.backward()
time.sleep(0.5)
self.robot.stop()
elif cmd[0] == '/destra':
self.bot.sendMessage(chat_id, "ok, giro a destra")
self.robot.right()
time.sleep(0.5)
self.robot.stop()
elif cmd[0] == '/sinistra':
self.bot.sendMessage(chat_id, "ok, giro a sinistra")
self.robot.left()
time.sleep(0.5)
self.robot.stop()
else:
self.bot.sendMessage(chat_id, "scusa, non capisco, conosco solo il comando '/ciao'")
print msg
sys.stdout.flush()
Provate quindi a rilanciare il programma e far muovere un robot. Ecco qui un video che mostra il risultato finale!